|
|
Animation sur le thème Hugo
« Un cœur à tout prix »
Chi Min HSIEH
Nous avons réalisé notre TP d’animation à l’aide de deux logiciels différent 3DSMAX et MAYA. Nous avons travaillé ensemble pour élaborer un story board et nous nous sommes partagés le travail pour réaliser les différentes scènes après. Souha a réalisé les scènes 1, 2, 3, 4 et a écrit le rapport . Chi Min a réalisé les scènes 0, 5, 6 et le montage du film. Nous avons validé ensemble chaque étape de notre travail.
Le robot Hugo remarque une affiche montrant deux ordinateurs amoureux : il a envie de vivre la même chose mais malheureusement il n’a pas de cœur.
Hugo traverse une ville dans le noir. Il se dirige vers un Laboratoire où il peut échanger ses deux yeux contre un cœur.
IL entre dans le laboratoire. Il est figé pour se faire opérer.
Trois faisceaux laser sont émis. Deux ont pour but de lui arracher les yeux. Le troisième va lui insérer un cœur.
Les yeux de Hugo vont sauter de leurs place et exploser.
Hugo est maintenant aveugle mais heureux. Il danse.
Scène 0 : présentation du titre du film
|
|
Modélisation :
Des lettres,
Un modèle de cœur.
Eclairage :
Un projecteur cible projette une lumière sur le mot cœur.
Rendu :
Le rendu de la scène est fait avec Renderman.
Scène 1 :Hugo regarde l’affiche
Modélisation :
Le support de l’affiche est un plan auxquels on plaque une texture (affiche)
Eclairage :
Eclairage ambiant
Scène 2: Hugo traverse la ville sombre pour aller au laboratoire
Modélisation :
La rue et les trottoirs sont modélisés par des plans auxquels nous avons appliqués des textures d’herbes, le mapping est planaire,
Nous avons utilisé un mapping de boites pour des modèles de bâtiments. Les textures utilisées sont celle de bâtiment modernes,
Le laboratoire de recherche est modélisé par un objet de type boite. Les modificateurs courber et effiler sont appliqués à la boite pour la déformer. Un mapping avec l’image d’un iris lui est appliqué: c’est un laboratoire qui enlève les yeux des robots,
Une Caméra cible permet de parcourir la ville
Une Caméra cible fixe montre une vue de face de Hugo s’orientant vers sa destination (il prend une courbe )
Une lumière directionnelle cible blanche est appliquée à toute la scène pour avoir un éclairage naturel
Un projecteur cible éclaire le laboratoire. Nous montrons avec cette lumière la destination du robot.
Techniques d’ animation :
Nous avons animé la caméra en utilisant la technique Keyframe . Nous avons modifié les propriétés de ces positions via la vue piste pour rendre le passage par les clés moins brusque. La caméra présente l’environnement de la scène (en parcourant la ville) ainsi que les personnage : elle parcours la ville et s’immobilise lorsqu’elle atteint une image qui montre Hugo et sa destination ,
Nous avons animé Hugo en effectuant une animation d’un bipède en mode pas associés à ce dernier. Pour appliquer cette technique, il faut définir une hiérarchie des membres de Hugo et les lier à ceux du bipède. Après, en créant des pas et on les éditant, la trajectoire de Hugo est définie. Lors de l’animation, les membres de Hugo se placeront convenablement pour assurer ce mouvement (c’est de la cinématique inverse implicitement ). Pour améliorer cette animation (éviter des intersections des membres du corps, déhanchement, regard d’un coté et d’autre), nous avons ajouté des positions clés.
Scène 3 :Hugo soumis aux faisceaux laser
Modélisation :
L’ intérieur du laboratoire est modélisé avec des formes géométriques simples tel que plans (pour le fond du laboratoire et le sol), un extrude pour les murs, des sphères comme sources de lumières,
Le système qui fige Hugo est de géométrie simple (un tube et ). Nous avons utilisées une texture pour donner un effet de champ magnétique intense,
Le cœur est modélisé par un maillage,
Les faisceaux laser sont des boites de faibles dimensions,
Nous avons utilisés deux caméra cibles immobiles. La première présente l’intérieur du laboratoire et l’état de Hugo. La deuxième filme Hugo de coté pour montrer l’application des faisceaux lasers.
Eclairage :
Deux lumières omnidirectionnelle pour faire un éclairage locale à partir des sphères.
Effet de luisance (glow) ajouté aux lasers et au cœur.
Techniques d’ animation :
L’animation du cœur et des faisceaux laser est faite avec des contraintes de trajectoires. Ces éléments suivent une trajectoires rectilignes vers les yeux et la poitrine de Hugo.
Scène 4 : Après la soumission aux lasers dans la scène précédente, les deux yeux de Hugo vont sauter de leurs places et exploser après.
Modélisation :
Nous utilisons le modèle de Hugo fournit,
Une caméra cible qui filme la scène.
Éclairage :
Un éclairage ambiant est appliqué par défaut par 3DSMAX,
Nous avons mis une texture tourbillon en arrière plan pour exprimer l’enfer que vit Hugo en ce moment.
Techniques d’animation :
L’ animation des deux yeux se fait avec des contraintes de trajectoire. Chaque œil suit une courbe qui approche ses points de contrôle. Nous avons ajoutés des positions clés pour décrire la rotation propres et aléatoires des yeux. L’interpolation entre ces différentes clés permet d’avoir un mouvement plus amusant.
L’animation de l’explosion des yeux se fait en utilisant un système de particule. Deux réseaux ayant la même texture que les yeux de Hugo émettent des fragments objets,
L’animation de la caméra se fait avec la méthode de KeyFrame. Des rotations de la caméra avec des angles faibles permettent d’exprimer l’intensité de l’explosion.
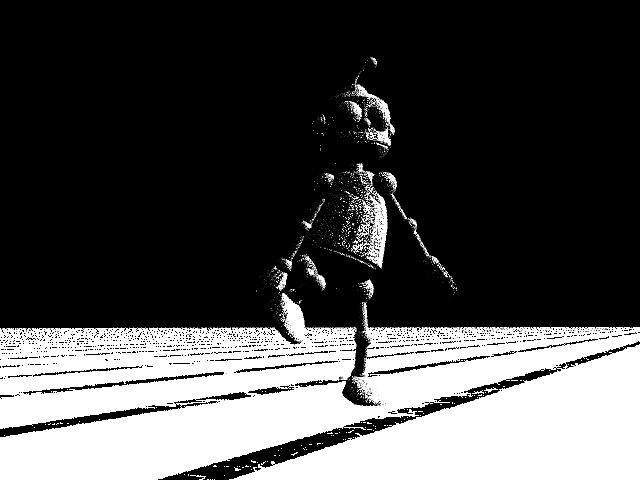
Scène 5 : la danse de Hugo (cette scène a été faite en utilisant le logiciel MAYA)
|
|
|
|
Modélisation :
Nous avons utilisé le modèle de Hugo. Nous lui avons appliqué des subdivisions pour le rendre plus lisse.
Nous avons crée une squelette. Des liaisons hiérarchique sont établie avec pour racine le bassin et pour fils les membres inférieurs, les membres supérieurs, la tête
Éclairage :
Un projecteur sur Hugo avec un effet de brouillard. Ce projecteur attire l’attention du spectateur sur la chorégraphie faite par Hugo.
Techniques d’animation :
L’animation du Hugo se fait à travers l’animation de son squelette (les membres suivent le mouvement du squelette),
La technique de la cinématique inverse (IK ) a été utilisé pour bloquer les pieds de Hugo et les empêcher de traverser le sol
Utilisation de la technique de la cinématique avant (FK) pour définir les positions des différents membres du corps.
Il s’agit de réaliser une chorégraphie qui a des rythmes. Les clés (pour FK) sont alors définie pour correspondre aux rythmes de la musique.
Il est difficile d’utiliser à la fois FK et IK pour certains mouvements qui sont un peu grand. Par exemple, si Hugo fait un grand angle avec son talon, son pied risque de traverser le sol.
Rendu :
Nous avons effectué un rendu artistique de Hugo qui danse.
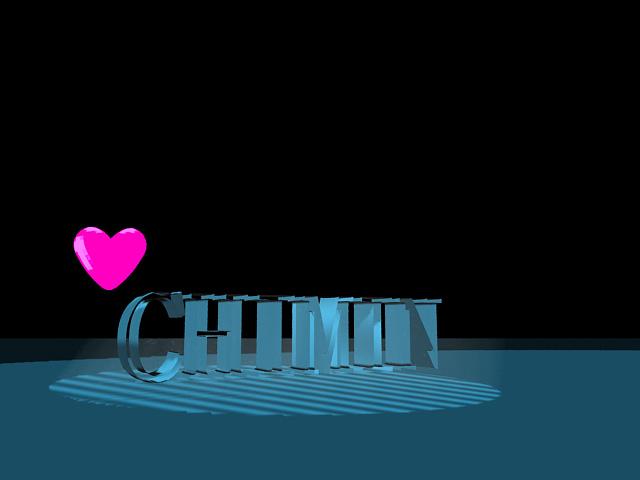
Scène 6 : Nous affichons les noms des réalisateurs du film (utilisation de MAYA)
|
|
|
Modélisation :
Nous affichons du texte,
Nous utilisons le modèle du cœur.
Éclairage :
Un projecteur cible éclaire la zone où nos noms seront affichés,
Une lumière directionnelle éclaire toute la scène.
Techniques d’animation :
L’animation du nom CHI MIN se fait en utilisant un objet FFD,
L’animation de la déformation du cœur est un morphing.
Rendu :
Le rendu de la scène est fait avec Renderman
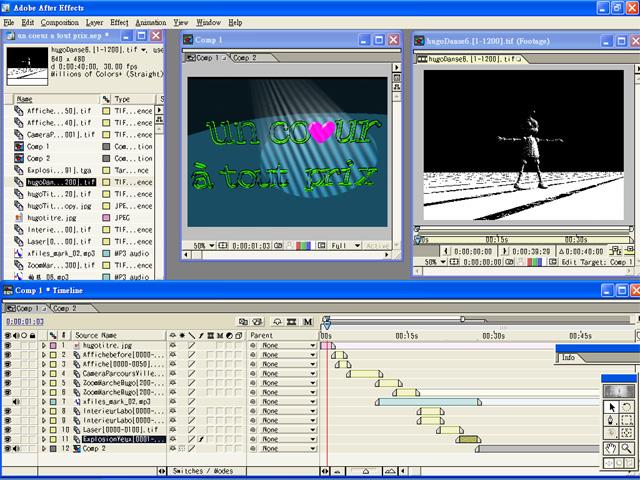
Nous avons utilisé le logiciel Adobe After Effects pour faire le montage du film.
|
|
Nous avons effectué un rendu de toutes les images des scènes de notre film . A partir de ces images, nous avons fait le montage en ajoutant du son.
Lors du montage, il est possible de modifier la durée de l’animation: 100 images peuvent donner lieu à une animation d’une durée de 4 secondes ou de 6 secondes.
Nous avons utilisé 2 musiques différentes : une musique de Hip Hop « Elephfunk » pour la chorégraphie de Hugo et la musique de X-Files pour les scènes 2, 3, 4.