
Hugo in the kitchen
|
|
|
| 1. Présentation du projet |
|
Le but du projet était de réaliser des gags autour du personnage de Hugo, mascotte de Eurographics 2004. Pour cela, nous devions
mettre en pratique le plus de techniques d'animation vues en cours, quelques techniques de modélisation et réaliser le montage. |
| 2. Story Board et comparaison avec l'animation finale |
| Story Board | Techniques d'animation / Montage | Image de l'animation finale |
|---|---|---|
|
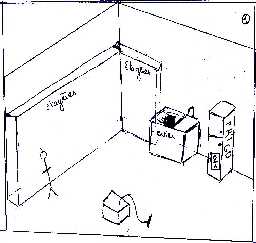
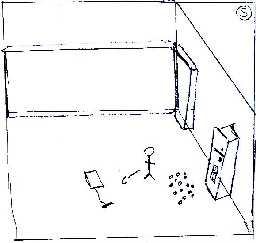
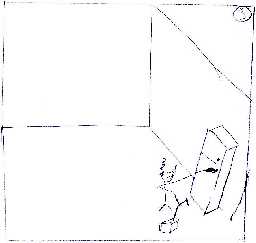
Caméra placée de telle sorte que l'on ait une vue d'ensemble de la cuisine. Les élements principaux du film sont visibles:
Techniques d'animation:
|

|
|
La caméra se déplace vers la droite, pour voir Hugo prendre la boîte de confettis.
|

|
|
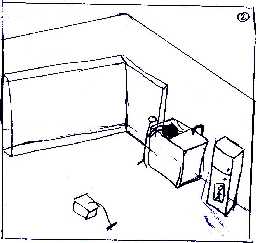
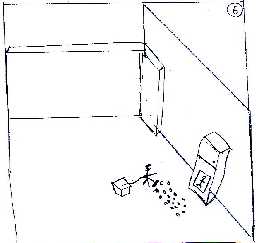
La boîte de confettis n'avait pas de couvercle et était posée ŕ l'envers sur l'évier. Les confettis tombent par terre lorsque Hugo avance.
La caméra tourne encore vers la droite, pour voir Hugo de face lorsqu'il avance avec la boîte.
|

|
|
Hugo n'est pas content d'avoir fait tomber les confettis. Ses paupičres se "fronçent". La caméra est toujours face ŕ Hugo.
|

|
|
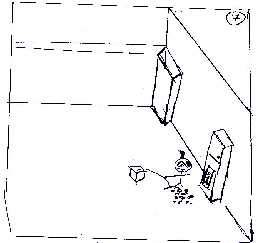
Hugo lâche la boite de confettis et va chercher l'aspirateur, posé non loin de lui. La caméra le suit.
|

|
|
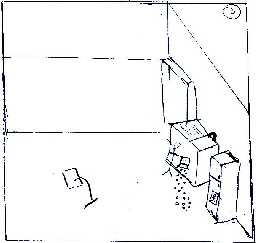
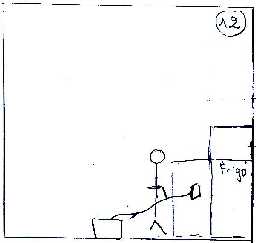
Hugo commence ŕ aspirer les confettis. La caméra se positionne pour le voir de côté et pour voir le frigo.
|

|
|
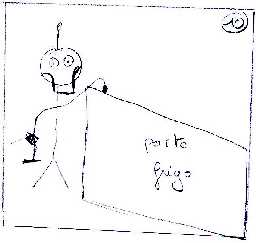
Caméra tourne vers la droite pour voir Hugo plus de face. Quelque chose sur le frigo attire l'attention de Hugo. C'est la photo d'une femme robot.
Hugo prend l'air étonné et commence ŕ rougir. Il tient toujours l'aspirateur dans sa main.
|

|
|
Image ajoutée
|

|
|
|
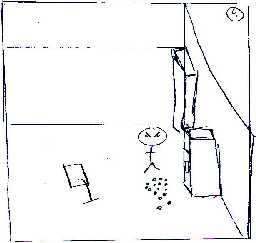
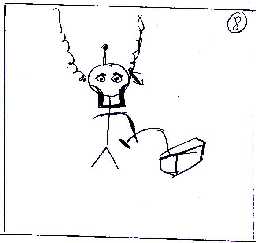
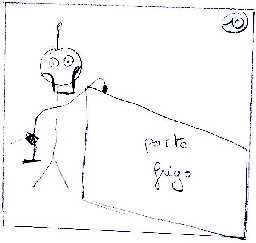
Gros plan sur Hugo qui s'est mis face ŕ la photo, donc face au frigo. Changement de caméra.
Hugo devient de plus en plus rouge, de la fumée sort de ses oreilles, et il réagit ŕ la Tex Avery: Ses yeux sortent de ses orbites et sa machoire tombe vers le bas.
Il tient toujours l'aspirateur.
|

|
|
Changement de caméra pour voir Hugo de côté. On voit Hugo complčtement fou ouvrir la porte du frigo.
Hugo tient toujours l'aspirateur.
|

|
|
Changement de caméra. La caméra se trouve ŕ l'intérieur du frigo et on voit Hugo ouvrir la porte. La lumičre du frigo éclaire Hugo. et la porte du frigo.
|

|
|
La caméra est toujours dans le frigo. On voit Hugo approcher l'embout de l'aspirateur qui se déforme comme s'il allait nous avaler.(non réalisé finalement).
Hugo commence ŕ aspirer les objets contenus dans le frigo.
|

|
|
Changement de caméra. On voit Hugo de côté, de telle maničre qu'on puisse voir l'aspirateur et le tuyau de l'aspirateur.
|

|
|
Pas de changement de caméra.
Le tuyau se déforme ŕ cause des objets qu'il aspire. La boîte de l'aspirateur grossit de plus en plus.
|

|
|
Pas de changement de caméra.
Le tuyau se déforme toujours ŕ cause des objets qu'il aspire. La boîte de l'aspirateur devient énorme.
|

|
|
Pas de changement de caméra. L'aspirateur explose et détruit la cuisine et Hugo.
|
|
| 3. Modélisation |
|
|
| 4. Montage |
|
|
| 5. Répartition des tâches |
|
|
| 6. Conclusion |
|
|