Repères et hiérarchie: comment ça marche

Repères et hiérarchie: comment ça marche |
|

En toute logique, les coordonnées de la géométrie d'un Segment devraient être exprimées dans le repère du Joint père, qui lui même contiendrait sa transformation par rapport à son père (repères relatifs).
Si on applique ceci au joint HumanoidRoot auquel on apparente un Segment sacrum de taille (0.4 0.3 0.2):
DEF hanim_HumanoidRoot Joint {
name "HumanoidRoot"
translation 0 0 0
rotation 0 0 1 0
center 0 0.903 -0.025
children [
# joints hierarchy ...
DEF sacrum Segment {
name "sacrum"
children Shape {
appearance Appearance {
material USE RedMtl
}
geometry IndexedFaceSet {
coord Coordinate {
point [ -0.2 0 -0.1, 0.2 0 -0.1,
-0.2 0.3 -0.1, 0.2 0.3 -0.1,
-0.2 0 0.1, 0.2 0 0.1,
-0.2 0.3 0.1, 0.2 0.3 0.1 ]
}
coordIndex [ ... ]
}
}
}
]
} |
 |
DEF hanim_HumanoidRoot Joint {
name "HumanoidRoot"
translation 0 0 0
rotation 0 0 1 0
center 0 0.903 -0.025
children [
# joints hierarchy ...
DEF sacrum Segment {
name "sacrum"
children Shape {
appearance Appearance {
material USE RedMtl
}
geometry IndexedFaceSet {
coord Coordinate {
point [ -0.2 0.903 -0.125, 0.2 0.903 -0.125,
-0.2 1.203 -0.125, 0.2 1.203 -0.125,
-0.2 0.903 0.075, 0.2 0.903 0.075,
-0.2 1.203 0.075, 0.2 1.203 0.075 ]
}
coordIndex [ ... ]
}
}
}
]
} |
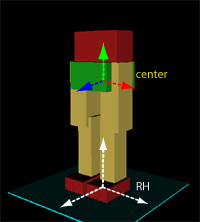 |
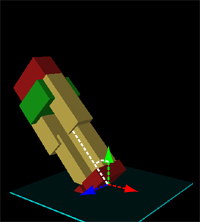
Comme le montrent les exemples suivants, le champ center d'un Joint donne l'origine du repère local dans lequel seront effectuées les transformations définies dans les champs translation, rotation etc de ce même Joint, l'orientation des axes quant à elle est la même que celle du repère père (pour HumanoidRoot c'est le repère absolu). Ces transformations se transmettent à tous les Joints enfants de par leur organisation arborescente.
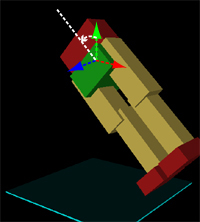
| HumanoidRoot : - center translaté par rapport à RH - rotation de 45° autour de Z |
|||
DEF HumanoidRoot Joint {
...
translation 0 0 0
rotation 0 0 1 0.785
center 0 0.903 -0.025
children [
...
]
} |
 |
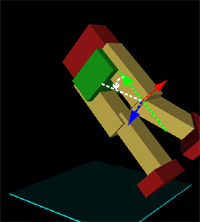
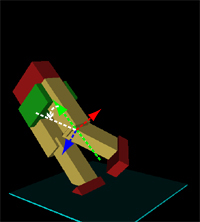
l_knee : - center translaté par rapport à RH - rotation de 45° autour de X |
|
DEF l_knee Joint {
...
translation 0 0 0
rotation 1 0 0 0.785
center 0.109 0.493 0.024
children [
...
]
} |
 |
||
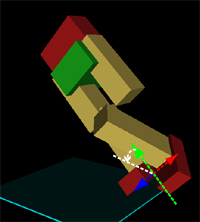
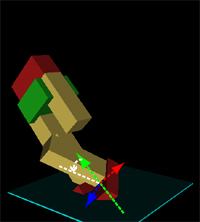
| l_knee : - center en 0 0 0 (center coincide avec l'origine de RH) - rotation de 45° autour de X |
|||
DEF l_knee Joint {
...
translation 0 0 0
rotation 1 0 0 0.785
center 0 0 0
children [
...
]
} |
 |
||
| HumanoidRoot : - center en 0 0 0 (center coincide avec l'origine de RH) - rotation de 45° autour de Z |
|||
DEF HumanoidRoot Joint {
name "HumanoidRoot"
translation 0 0 0
rotation 0 0 1 0.785
center 0 0 0
children [
...
]
} |
 |
l_knee : - center translaté par rapport à RH - rotation de 45° autour de X |
|
DEF l_knee Joint {
...
translation 0 0 0
rotation 1 0 0 0.785
center 0.109 0.493 0.024
children [
...
]
} |
 |
||
| l_knee : - center en 0 0 0 (center coincide avec l'origine de RH) - rotation de 45° autour de X |
|||
DEF l_knee Joint {
...
translation 0 0 0
rotation 1 0 0 0.785
center 0 0 0
children [
...
]
} |
 |
||