
Laurence Boissieux Homepage
Projet HUMANS
Présentation de H-ANIM
Intro
H-Anim est une norme standard internationale (n° ISO/IEC FCD 19774) pour la description de personnages 3D animés destinée à rendre les personnages virtuels compatibles avec les différents systèmes de modélisation, animation, capture de mouvements et visualisation.
La version actuelle de la spécification H-Anim est 200x.
Définitions
La représentation d'un personnage 3D articulé est appelée personnage H-Anim, constituée:
- d'un objet humanoid, racine du personnage H-Anim
- d'objets joints, décrivant la position de ses articulations et organisés hiérarchiquement à partir de la racine humanoid
- d'objets segments, représentant la géométrie et l'apparence des ses différentes parties
- d'objets displacers, spécifiant des contraintes de mouvement
- d'objets sites, permettant la mise en place de caméras virtuelles, d'effecteurs de CI ou de points d'attachement pour des accessoires
On parlera également de niveau d'articulation (LOA) correspondant au nombre de joints de l'humanoid.
Concepts
Même si la norme concerne principalement les personnages humains, il est possible d'enrichir la hiérarchie d'autres membres, têtes etc.
Géométrie
La géométrie d'un personnage H-Anim peut être décrite selon deux méthodes différentes:
- Skeletal (à partir du squelette): chaque partie du corps est définie séparément dans des objets segments associés aux joints dans la hiérarchie du squelette, elle-même définie dans le champs skeleton de l'objet humanoid
- Skinned (à partir de la peau): dans ce cas la géométrie est définie comme un maillage unique continu dans le champ skin de l'objet humanoid
Modélisation
Des conventions ont été mises en place pour assurer la compatibilité d'une animation avec n'importe quel personnage H-Anim ainsi que la cohérence de ces personnages. Les contraintes concernent la pose initiale d'un personnage avant animation:
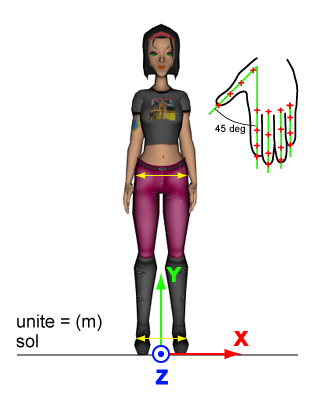 |
|
Dans cette position initiale, tous les angles des joints sont à 0 (champs rotation =(0 0 1 0), translation=(0 0 0), échelle=(1 1 1) ).
Structure
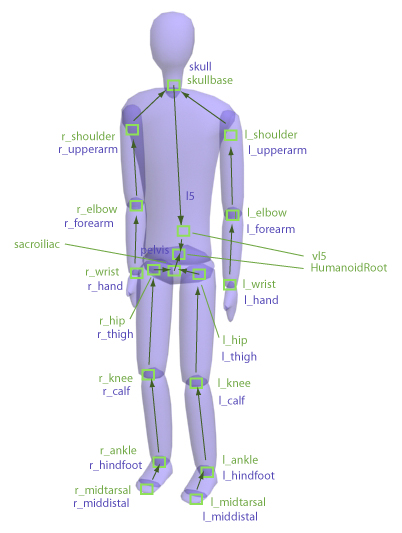
Un corps H-Anim est une hiérarchie d'objets joint, auxquels peuvent être associés des objets segment. Les paires joint-segment doivent suivre la convention de nommage établie dans le standard H-Anim. La hiérarchie complète des joints et leurs segments associés est donnée ci-dessous:
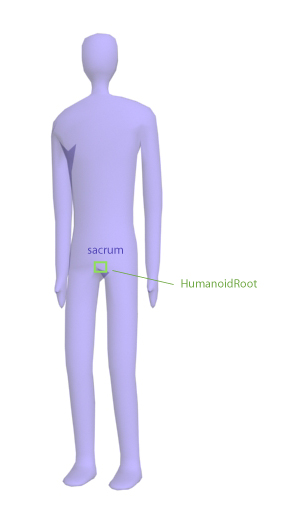
HumanoidRoot : sacrum
sacroiliac : pelvis
| l_hip : l_thigh
| l_knee : l_calf
| l_ankle : l_hindfoot
| l_subtalar : l_midproximal
| l_midtarsal : l_middistal
| l_metatarsal : l_forefoot
| r_hip : r_thigh
| r_knee : r_calf
| r_ankle : r_hindfoot
| r_subtalar : r_midproximal
| r_midtarsal : r_middistal
| r_metatarsal : r_forefoot
vl5 : l5
vl4 : l4
vl3 : l3
vl2 : l2
vl1 : l1
vt12 : t12
vt11 : t11
vt10 : t10
vt9 : t9
vt8 : t8
vt7 : t7
vt6 : t6
vt5 : t5
vt4 : t4
vt3 : t3
vt2 : t2
vt1 : t1
vc7 : c7
| vc6 : c6
| vc5 : c5
| vc4 : c4
| vc3 : c3
| vc2 : c2
| vc1 : c1
| skullbase : skull
| l_eyelid_joint : l_eyelid
| r_eyelid_joint : r_eyelid
| l_eyeball_joint : l_eyeball
| r_eyeball_joint : r_eyeball
| l_eyebrow_joint : l_eyebrow
| r_eyebrow_joint : r_eyebrow
| temporomandibular : jaw
l_sternoclavicular : l_clavicle
| l_acromioclavicular : l_scapula
| l_shoulder : l_upperarm
| l_elbow : l_forearm
| l_wrist : l_hand
| l_thumb1 : l_thumb_metacarpal
| l_thumb2 : l_thumb_proximal
| l_thumb3 : l_thumb_distal
| l_index0 : l_index_metacarpal
| l_index1 : l_index_proximal
| l_index2 : l_index_middle
| l_index3 : l_index_distal
| l_middle0 : l_middle_metacarpal
| l_middle1 : l_middle_proximal
| l_middle2 : l_middle_middle
| l_middle3 : l_middle_distal
| l_ring0 : l_ring_metacarpal
| l_ring1 : l_ring_proximal
| l_ring2 l_ring_middle
| l_ring3 : l_ring_distal
| l_pinky0 : l_pinky_metacarpal
| l_pinky1 : l_pinky_proximal
| l_pinky2 : l_pinky_middle
| l_pinky3 : l_pinky_distal
r_sternoclavicular : r_clavicle
r_acromioclavicular : r_scapula
r_shoulder : r_upperarm
r_elbow : r_forearm
r_wrist : r_hand
r_thumb1 : r_thumb_metacarpal
r_thumb2 : r_thumb_proximal
r_thumb3 : r_thumb_distal
r_index0 : r_index_metacarpal
r_index1 : r_index_proximal
r_index2 : r_index_middle
r_index3 : r_index_distal
r_middle0 : r_middle_metacarpal
r_middle1 : r_middle_proximal
r_middle2 : r_middle_middle
r_middle3 : r_middle_distal
r_ring0 : r_ring_metacarpal
r_ring1 : r_ring_proximal
r_ring2 : r_ring_middle
r_ring3 : r_ring_distal
r_pinky0 : r_pinky_metacarpal
r_pinky1 : r_pinky_proximal
r_pinky2 : r_pinky_middle
r_pinky3 : r_pinky_distal
Joints et Segments supplémentaires
Les pré-requis pour ajouter de nouveaux joints et segments à la hiérarchie de base sont:
- utiliser en premier lieu les joints standard (ne pas utiliser un autre nom pour un joint défini dans le standard)
- les nouveaux joints peuvent être enfants des joints standard ou d'autres joints non-standard, mais ne peuvent pas s'insérer dans la chaîne de base (impossible de rajouter un second coude au bras par exemple)
- les nouveaux joints ne doivent pas interférer avec le mouvement des joints standards
- les nouveaux joints doivent être préfixés par "x_"
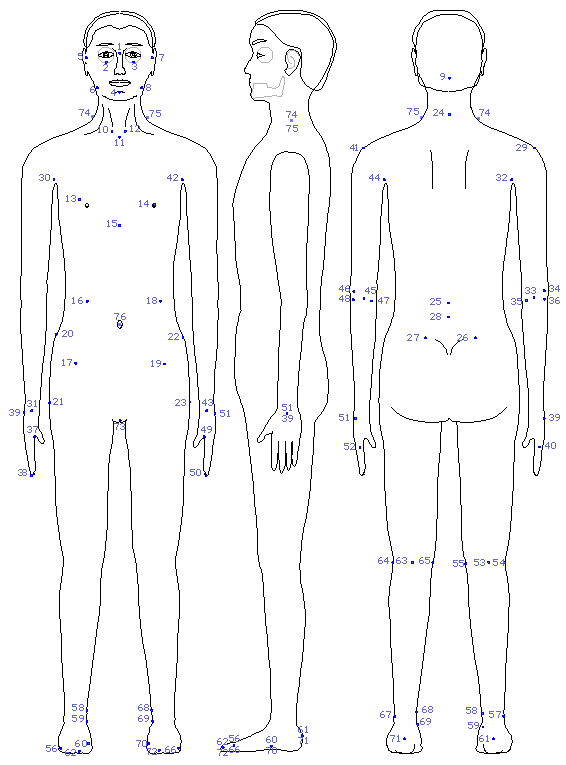
Points caractéristiques
Ces points caractéristiques de surface sont généralement spécifiés dans les objets Displacers, leur CoordIndex est l'index du sommet du maillage le plus proche. Ils peuvent également être utilisés pour définir des Sites (cf exemples sur le site h-anim).
|
 |
|
LOA (Niveaux d'articulation)
Dans les hiérarchies, les cases vertes représentent les Joints, les bleues les Segments.
LOA 0
C'est le niveau minimal supporté pour un personnage h-anim. Seul le joint HumanoidRoot est requis (avec le Segment sacrum pour fils).
 |
 |
LOA 1
Ce niveau est généralement employé pour les personnages temps réels à basse polygonisation.
 |
 |
LOA 2
Ce niveau correspond à des personnages ayant une colonne simplifiée (3 lombaires, 3 thoraciques, 2 cervicales), des plantes de pied articulées (subtalar, midtarsal, metatarsal), et l'ensemble des phalanges pour chacun des doigts de la main.
LOA 3
Ce niveau supporte la hiérarchie h-anim complète comme présentée au paragraphe structure.
Interface
Objet Humanoid
Cet objet contient la définition du personnage hanim au travers de ses différents champs.
Description
| Champ | Type | Description | Valeur par défaut |
| bboxCenter | float[3] | bounding box du
personnage elle peut ne pas être définie (valeurs par défaut) | 0 0 0 |
| bboxSize | float[3] | -1 -1 -1 | |
| center | float[3] | translation par rapport au repère local (0, 0, 0) | 0 0 0 |
| translation | float[3] | translation du repère du personnage h-anim | 0 0 0 |
| rotation | float[4] | rotation du repère du personnage h-anim | 0 0 1 0 |
| scale | float[3] | facteur d'échelle non uniforme du personnage h-anim | 1 1 1 |
| scaleOrientation | float[4] | orientation dans laquelle sera effectué le facteur d'échelle | 0 0 1 0 |
| info | sequence<string> | informations
générales sur le personnage h-anim du type: "authorName=xxx" "authorEmail=xxx" "copyright=xxx" "creationDate=xxx" "usageRestrictions=xxx" "humanoidVersion=xxx" "age=xxx" "gender=xxx" habituellement female male or neuter "height=xxx" "weight=xxx" | [ ] |
| version | string | version de la norme h-anim utilisée | "200x" |
| name | string | nom (obligatoire) du personnage h-anim | "" |
| skeleton | sequence<Object> | contient le Joint HumanoidRoot, racine de la hiérarchie des Joints du personnage h-anim ainsi que la définition de cette dernière. Toute transformation appliquée à l'objet Humanoid est donc répercutée à l'ensemble de la hiérarchie. Il peut également contenir des objets Sites | [ ] |
| joints | sequence<Object> | contient une liste des Joints utilisés dans la hiérarchie définie dans le champ skeleton (liste de références) | [ ] |
| segments | sequence<Object> | contient une liste des Segments utilisés dans la hiérarchie définie dans le champ skeleton (liste de références) | [ ] |
| sites | sequence<Object> | contient une liste des Sites utilisés dans la hiérarchie définie dans le champ skeleton (liste de références) | [ ] |
| viewpoints | sequence<Object> | peut contenir des objets Sites qui seront affectés uniquement par les transformations appliquées à l'objet Humanoid (caméras virtuelles) | [ ] |
| skin | sequence<Object> | contient une ou plusieurs définitions d'indexed face sets. | [ ] |
| skinCoord | sequence<float[3]> | contient une séquence de points utilisés dans la définition des indexed face sets du champ skin | [ ] |
| skinNormal | sequence<float[3]> | contient une séquence de normales utilisées dans la définition des indexed face sets du champ skin | [ ] |
Note: les différences de h-anim 200x par rapport à h-anim 1.1 sont:
- remplacement du champ humanoidBody par le champ skeleton
- ajout des champs skin, skinCoord et SkinNormal pour la gestion d'une peau continue
Implémentation VRML
PROTO Humanoid [
field SFVec3f bboxCenter 0 0 0
field SFVec3f bboxSize -1 -1 -1
exposedField SFVec3f center 0 0 0
exposedField MFString info [ ]
exposedField MFNode joints [ ]
exposedField SFString name ""
exposedField SFRotation rotation 0 0 1 0
exposedField SFVec3f scale 1 1 1
exposedField SFRotation scaleOrientation 0 0 1 0
exposedField MFNode segments [ ]
exposedField MFNode sites [ ]
exposedField MFNode skeleton [ ]
exposedField MFNode skin [ ]
exposedField SFNode skinCoord NULL
exposedField SFNode skinNormal NULL
exposedField SFVec3f translation 0 0 0
exposedField SFString version "200x"
exposedField MFNode viewpoints [ ]
]
{
Transform {
bboxCenter IS bboxCenter
bboxSize IS bboxSize
center IS center
rotation IS rotation
scale IS scale
scaleOrientation IS scaleOrientation
translation IS translation
children [
Group {
children IS viewpoints
}
Group {
children IS skeleton
}
]
}
}
DEF Humanoid Humanoid {
info [ "humanoidVersion=BipLow v1.0",
"authorName=Laurence Boissieux",
"authorEmail=Laurence.Boissieux@inrialpes.fr",
"copyright=2005 INRIA , all rights reserved.",
"creationDate=Mon Feb 28 2005",
"usageRestrictions=Noncommercial usage is ok if INRIA name is present
and proper credit is given." ]
name "BipLow"
version "200x"
skeleton [
DEF hanim_HumanoidRoot Joint {...
}
]
joints [ USE hanim_HumanoidRoot,
... ]
segments [ USE hanim_pelvis,
... ]
viewpoints [
DEF FrontView Viewpoint {
...
}
...
]
}
Objet Joint
Cet objet contient la définition des éléments articulaires du personnage h-anim
Description
| Champ | Type | Description | Valeur par défaut |
| name | string | seul champ obligatoire, le nom doit suivre
les conventions suivantes:
| "" |
| center | float[3] | coordonnées du centre du Joint par rapport à la racine du personnage h-anim (objet Humanoid) | 0 0 0 |
| translation | float[3] | translation du Joint dans le repère père | 0 0 0 |
| rotation | float[4] | rotation du Joint dans le repère père | 0 0 1 0 |
| scale | float[3] | facteur d'échelle non uniforme du Joint | 1 1 1 |
| scaleOrientation | float[4] | orientation dans laquelle sera effectué le facteur d'échelle | 0 0 1 0 |
| skinCoordWeight | sequence<float> | séquence de points de valeurs entre 0 et 1 utilisés pour pondérer les sommets contenus dans le champ skinCoord de l'Objet Humanoid | [ ] |
| skinCoordIndex | sequence<int> | séquence d'indices indiquant quelles cooronnées influencer | [ ] |
| llimit | sequence<float[3]> | limite inférieure de rotation du Joint autour de X Y et Z, aucune contrainte par défaut | [ ] |
| ulimit | sequence<float[3]> | limite supérieure de rotation du Joint autour de X Y et Z, aucune contrainte par défaut | [ ] |
| limitOrientation | float[4] | orientation des axes contraintes sur lesquels s'appliquent les limites, ce repère ayant pour origine l'origine du Joint | 0 0 1 0 |
| stiffness | sequence<float[3]> | si présent, contient des valeurs entre 0 et 1 indiquant l'amplitude à appliquer à chacun des degrés de liberté pour calculer la rotation à chaque pas dans le cadre d'un solver de cinématique inverse | [0 0 0] |
| displacers | sequence<Object> | liste d'objets Displacer utilisés pour déformer le maillage | [ ] |
| children | sequence<Object> | contient la suite de la hiérarchie (objet(s) Segment et Joints enfants) | [ ] |
Implémentation VRML
...
PROTO Joint [
exposedField SFVec3f center 0 0 0
exposedField MFNode children [ ]
exposedField MFFloat llimit [ ]
exposedField SFRotation limitOrientation 0 0 1 0
exposedField SFString name ""
exposedField SFRotation rotation 0 0 1 0
exposedField SFVec3f scale 1 1 1
exposedField SFRotation scaleOrientation 0 0 1 0
exposedField MFInt32 skinCoordIndex [ ]
exposedField MFFloat skinCoordWeight [ ]
exposedField MFFloat stiffness [ 0 0 0 ]
exposedField SFVec3f translation 0 0 0
exposedField MFFloat ulimit [ ]
]
{
Transform {
center IS center
children IS children
rotation IS rotation
scale IS scale
scaleOrientation IS scaleOrientation
translation IS translation
}
}
...
DEF hanim_HumanoidRoot Joint {
name "HumanoidRoot"
translation 0 0 0
rotation 0 0 1 0
center 0 0.903 -0.025
children [
DEF hanim_sacroiliac Joint {
name "sacroiliac"
rotation 0 0 1 0
center 0 0.903 0.025
children [
DEF hanim_pelvis Segment {...}
...
]
}
...
]
}
...
Objet Segment
Cet objet contient la définition des éléments constituant le corps du personnage h-anim
Description
| Champ | Type | Description | Valeur par défaut | bboxCenter | float[3] | bounding box de l'ensemble
des enfants du Segment elle peut ne pas être définie (valeurs par défaut) | 0 0 0 |
| bboxSize | float[3] | -1 -1 -1 | |
| name | string | seul champ obligatoire, le nom doit suivre
les conventions suivantes:
| "" |
| mass | float | masse du Segment | 0 |
| centerOfMass | float[3] | coordonnées du centre de masse dans le repère du Segment, par défaut il n'y a pas de masse | -1 -1 -1 |
| momentsOfInertia | float[9] | matrice du moment d'inertie | [ 0 0 0 0 0 0 0 0 0 ] |
| coord | sequence<float[3]> | pour les Segments dont le maillage est déformable, ce champ contiendra les coordonnées référencées à partir de l'IndexedFaceSet défini pour le Segment. La convention de nommage de ces coordonnées est nomSegment_coords (ex: l_thigh_coords) | NULL |
| displacers | sequence<Object> | liste d'objets Displacer utilisés pour déformer le maillage | [ ] |
| children | sequence<Object> | enfants du Segment (Shape pour définir la géométrie entre autres) | [ ] |
| addChildren | sequence<Object> | enfants à ajouter au Segment | |
| removeChildren | sequence<Object> | enfants du Segment à supprimer |
Implémentation VRML
...
PROTO Segment [
field SFVec3f bboxCenter 0 0 0
field SFVec3f bboxSize -1 -1 -1
exposedField SFVec3f centerOfMass 0 0 0
exposedField MFNode children [ ]
exposedField SFNode coord NULL
exposedField MFNode displacers [ ]
exposedField SFFloat mass 0
exposedField MFFloat momentsOfInertia [ 0 0 0 0 0 0 0 0 0 ]
exposedField SFString name ""
eventIn MFNode addChildren
eventIn MFNode removeChildren
]
{
Group {
addChildren IS addChildren
bboxCenter IS bboxCenter
bboxSize IS bboxSize
children IS children
removeChildren IS removeChildren
}
}
...
DEF hanim_pelvis Segment {
name "pelvis"
children Shape {
appearance Appearance {
material Material {
diffuseColor 0.102 0.6941 0.102
}
}
geometry IndexedFaceSet {
coord Coordinate {
point [ .... ]
}
coordIndex [ .... ]
creaseAngle 1.14
}
}
}
....
Objet Site
Cet objet contient des informations pour positionner des caméras, des points d'attachement d'accessoires etc.
Description
| Champ | Type | Description | Valeur par défaut |
| name | string | champ obligatoire, le nom doit suivre
les conventions suivantes:
| "" |
| center | float[3] | coordonnées du centre du Site par rapport à la racine du personnage h-anim (objet Humanoid) | 0 0 0 |
| translation | float[3] | translation du Site dans le repère père | 0 0 0 |
| rotation | float[4] | rotation du Site dans le repère père | 0 0 1 0 |
| scale | float[3] | facteur d'échelle non uniforme du Site | 1 1 1 |
| scaleOrientation | float[4] | orientation dans laquelle sera effectué le facteur d'échelle | 0 0 1 0 |
| children | sequence<Object> | enfants du Site | [ ] |
| addChildren | sequence<Object> | enfants à ajouter au Site | |
| removeChildren | sequence<Object> | enfants du Site à supprimer |
Implémentation VRML/Exemple
...
PROTO Site [
exposedField SFVec3f center 0 0 0
exposedField MFNode children []
exposedField SFString name ""
exposedField SFRotation rotation 0 0 1 0
exposedField SFVec3f scale 1 1 1
exposedField SFRotation scaleOrientation 0 0 1 0
exposedField SFVec3f translation 0 0 0
eventIn MFNode addChildren
eventIn MFNode removeChildren
]
{
Transform {
addChildren IS addChildren
center IS center
children IS children
removeChildren IS removeChildren
rotation IS rotation
scale IS scale
scaleOrientation IS scaleOrientation
translation IS translation
}
}
....
DEF hanim_crotch Site { # CAESAR Feature Point #73
name "crotch"
translation 0.0034 0.8266 0.0257
children [
]
}
....
Objet Displacer
Cet objet contient des informations pour positionner des contraintes de mouvement sur les élémens du personnage h-anim.
Description
| Champ | Type | Description | Valeur par défaut |
| name | string | seul champ obligatoire, le nom doit suivre
les conventions suivantes:
| "" |
| coordIndex | sequence<int> | indices des sommets du maillage affectés par le Displacer | [ ] |
| displacements | sequence<float> | valeurs 3D de déplacement maximum pour chacun des points du maillage référencés dans coordIndex | |
| weight | float | poids à appliquer aux valeurs de déplacement, en modulant ce poids on peut effectuer un morphing linéaire |
Les déplacements des Displacers contenus dans les champs des objets Segment sont définis et appliqués dans le repères des Segments. Ceux contenus dans les champs des objets Joint s'appliquent au maillage défini dans le champ skinCoord de l'objet Humanoid et dans le repère des Joints.
Note: le champ weight est une nouveauté de h-anim 200x par rapport à h-anim 1.1
Implémentation VRML/Exemple
...
PROTO displacer [
exposedField MFInt32 coordIndex [ ]
exposedField MFVec3f displacements [ ]
exposedField SFString name ""
exposedField SFFloat weight 0.0
]
...
DEF hanim_l_eyebrow_raiser_action Displacer {
coordIndex [ 7, 12, 21, 18 ]
displacements [ 0 0.0025 0, 0 0.005 0, 0 0.0025 0, 0 0.001 0 ]
name "l_eyebrow_raiser_action"
}
...
Pré-requis pour VRML et X3D
Les applications supportant le standard h-anim doivent au minimum supporter les noeuds suivants:
- Appearance
- Box
- Color
- Cone
- Coordinate
- Cylinder
- Group
- ImageTexture
- IndexedFaceSet
- IndexedLineSet
- Material
- NavigationInfo
- Normal
- Shape
- Sphere
- TextureCoordinate
- TextureTransform
- Transform
- Viewpoint
- WorldInfo
Exemples
- BipLow_h-anim.wrl: marche, course, saut + interface interactive, bboxes du robot
- BipHigh_h-anim_walk.wrl: marche, version détaillée du robot BIP
- BipHigh_h-anim.wrl: marche, course, saut + interface interactive, version détaillée du robot BIP
Viewers gratuits compatibles
| Nom | Type | Linux | Windows | Mac | URL |
| cortona | plug-in | X | X | http://www.parallelgraphics.com/products/browsers/ | |
| freewrl | standalone | X | X | http://sourceforge.net/projects/freewrl/ | |
| octaga | standalone | X | X | http://www.octaga.com/start/start.php?startpage=download_octaga |
Liens utiles
- http://www.h-anim.org/, site officiel du standard h-anim
- http://www.ballreich.net/vrml/h-anim/h-anim-examples.html, exemples h-anim-1.1
- http://www.cis.upenn.edu/~beitler/hanim1.0/index.html, exemples h-anim 1.0