
Laurence Boissieux Homepage
Stage 3ème: un aperçu de l'infographie 3D
Hiérarchie du robot
Actuellement, toutes les parties de votre robot sont indépendantes. si vous faites tourner le bras, il sera le seul à bouger et le reste restera sur place. De plus comme le montre l'exemple ci-dessous, le point de pivot (le centre de la rotation) est mal placé.
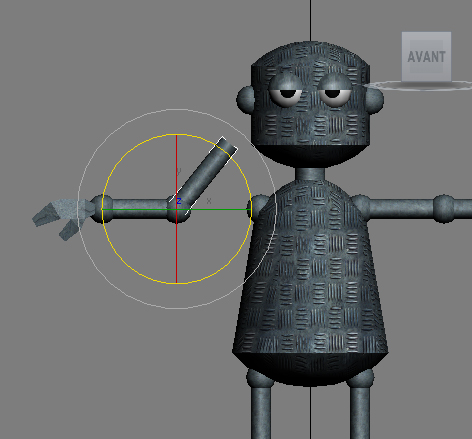
Dans ce cas vous imaginez que modifier tout le bras, va être compliqué et un peu pénible. La solution consiste à attacher les objets les uns aux autres de sorte que lorsque l'on en bouge un le reste suit.
De cette façon on va définir un élément qui sera le père, des éléments qui seront ses fils et bougeront avec lui.
En général on choisit comme père la partie du corps qui contient le centre de gravité, donc dans notre cas c'est le tronc. Ensuite les hanches, les épaules et le cou doivent suivre les mouvements du tronc: ce seront ses fils. Les bras seront fils des és;paules etc.
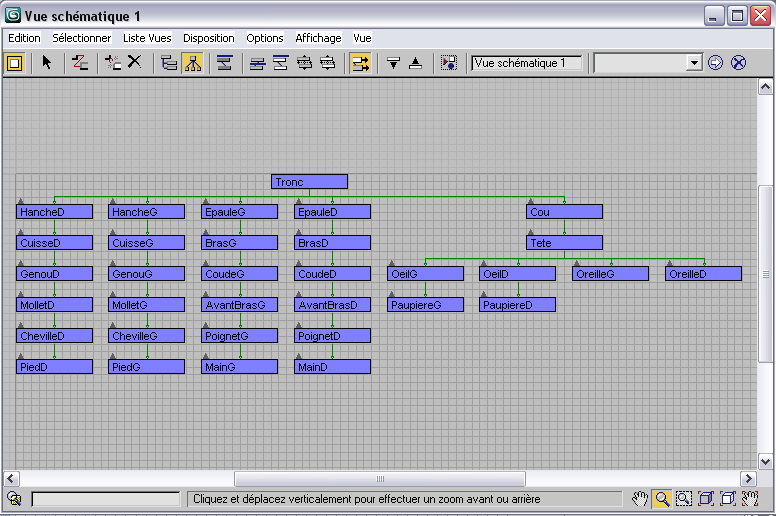
Pour réaliser cela, on va utiliser un éditeur appelé la vue schématique, dans laquelle tous les éléments (objets, matériaux etc.) sont représentés par des boîtes que l'on peut relier entre elles.
- Menu > Editeurs Graphiques > Nouvelle vue
schématique.
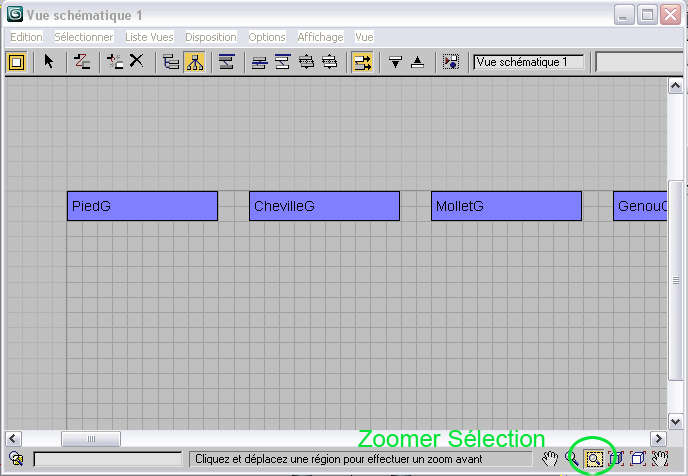
- Avec l'outil Zoomer Sélection, zoomez pour mieux voir les
boîtes PiedG et ChevilleG.
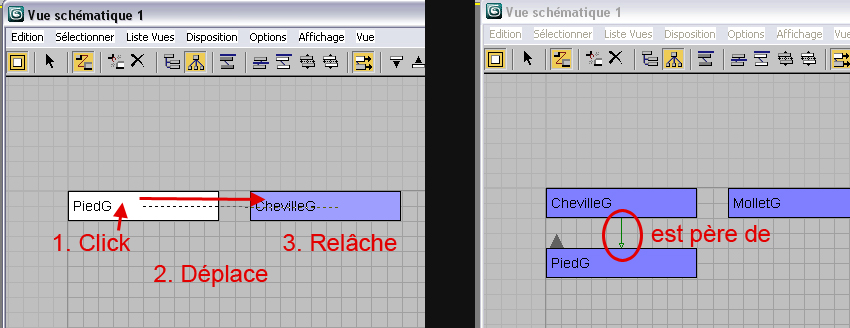
- Cliquez sur le bouton connecter
 . Vous
allez attacher le pied gauche à la cheville gauche. Cliquez sur la
boîte PiedG (elle devient blanche) , déplacez la souris vers la
bo&icirte ChevilleG puis relâchez le bouton de la souris. Losrque
l'opération est terminée, la boîte PiedG est placée
sous la boîte ChevilleG et une flèche verte va de la cheville
vers le pied, ce qui signifie que le pied est attaché (est fils) de la
cheville (et la cheville est père du pied).
. Vous
allez attacher le pied gauche à la cheville gauche. Cliquez sur la
boîte PiedG (elle devient blanche) , déplacez la souris vers la
bo&icirte ChevilleG puis relâchez le bouton de la souris. Losrque
l'opération est terminée, la boîte PiedG est placée
sous la boîte ChevilleG et une flèche verte va de la cheville
vers le pied, ce qui signifie que le pied est attaché (est fils) de la
cheville (et la cheville est père du pied).
- Il suffit maintenant de faire pareil avec tous les objets comme le montre
l'image ci-dessous:
Fermez la vue schématique. Pour modifier la position de votre robot,
il suffit de faire tourner les articulations: les épaules, les coudes,
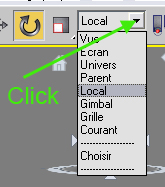
les poignets, les hanches, les genoux, les chevilles, le cou.... Passez en mode
Rotation et sélectionnez Local dans la liste déroulante.
C'est le moment d'être imaginatif!
